底盘相关问题
开机后如何初始化底盘
每次底盘开机后会重置地图的位置,将当前底盘所在的位置设置为零点。为了确保底盘每次运行所在的地图相同,需要导入之前使用过的地图。我们是使用底盘公司的上位机来导入地图的。
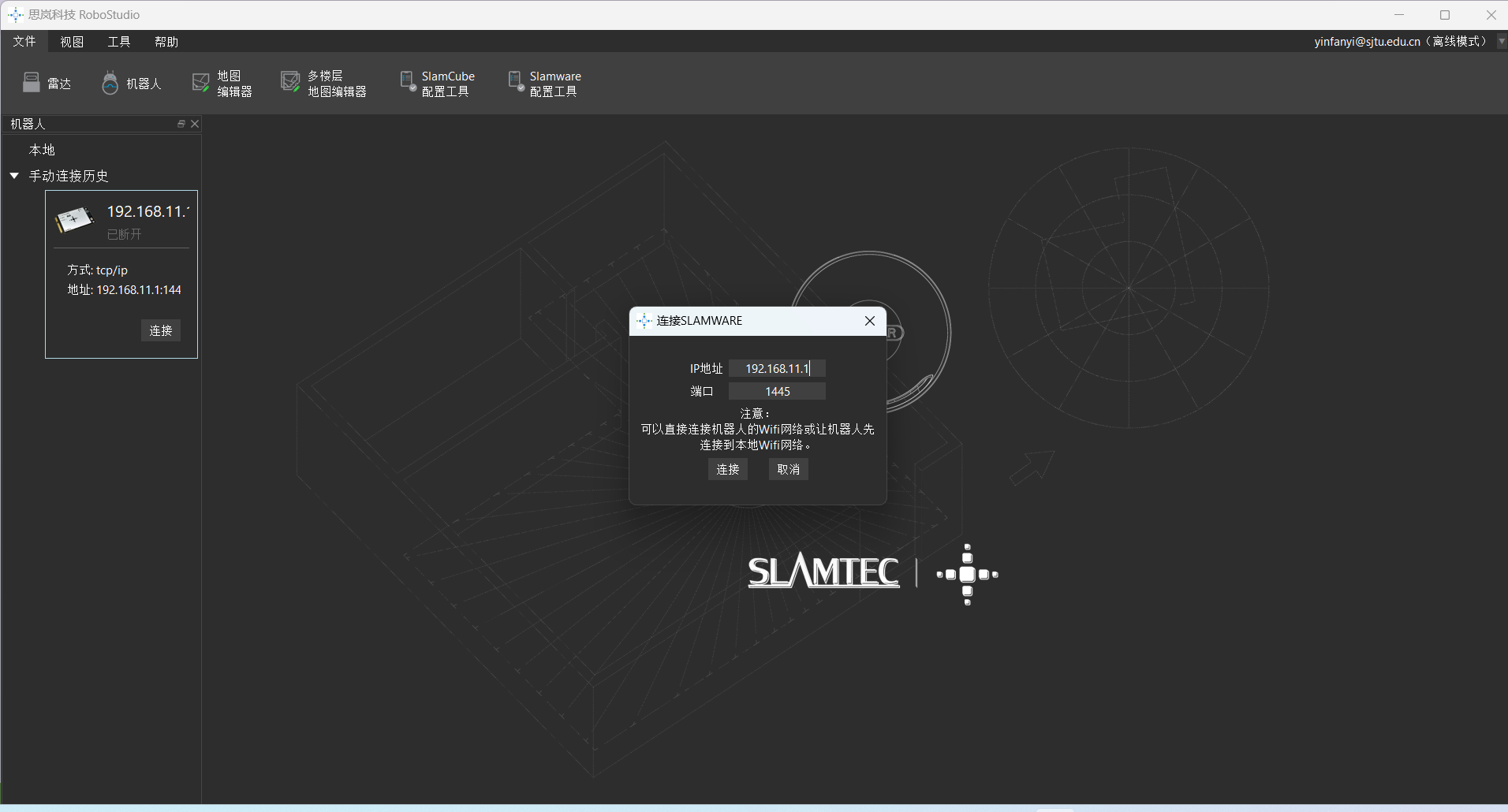
1.首先需要下载底盘上位机RobotStudio;
2.第一次使用上位机需要设置需要连接的底盘的IP地址。默认地址为:192.168.11.1;
3.每次开机后,先要手动将底盘移动到在房间的固定的世界坐标原点的位置(我们是将它在充电桩充电的位置设置为原点)
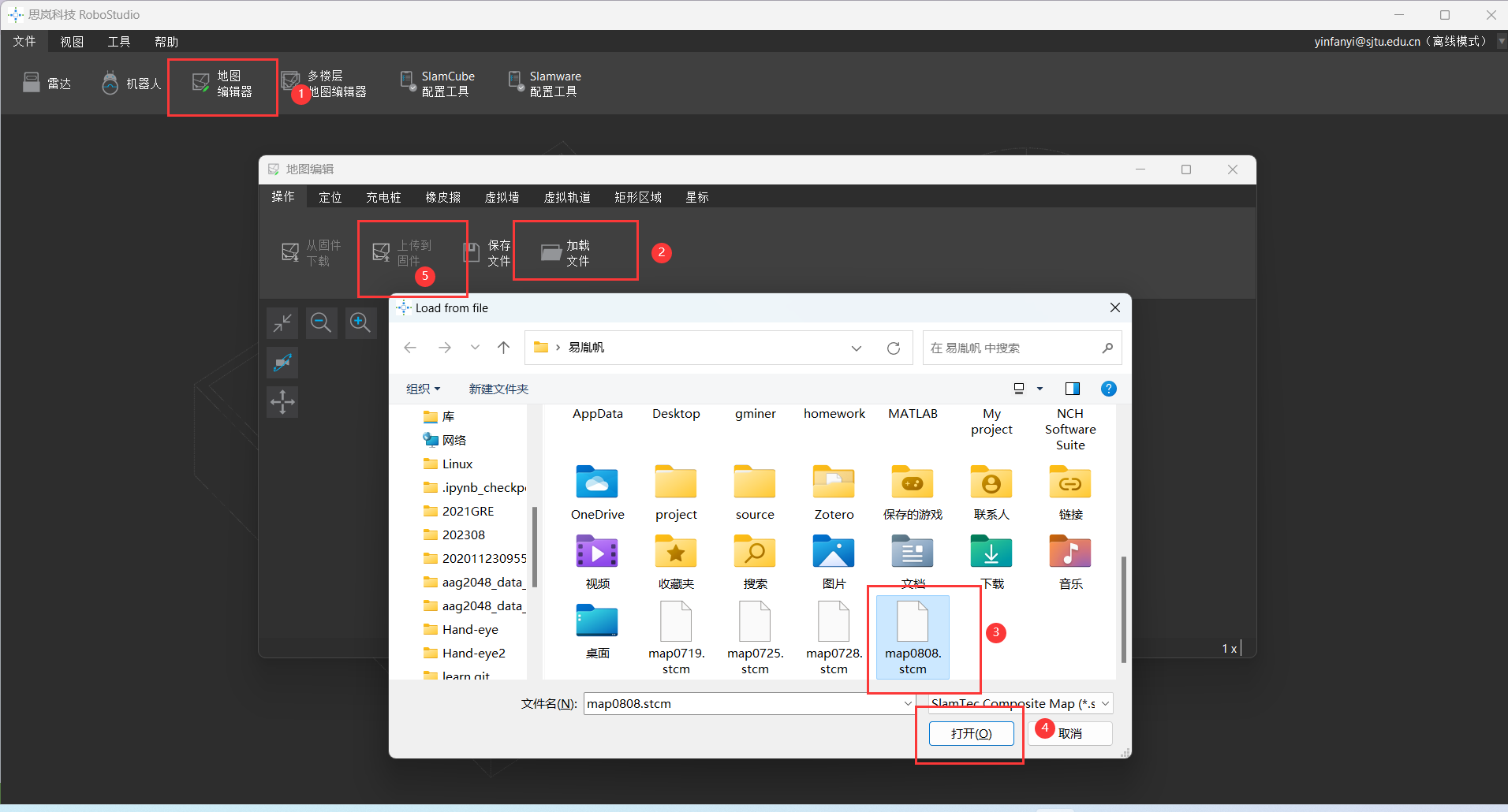
4.将底盘移动到原点后,按照如下图的步骤导入地图。地图文件在工作目录map文件夹里。
如何单独执行底盘的任务
1.初始化底盘类
chassis=Chassis()
2.定义和执行任务,例如”底盘移动以将没有试管的试管架转移到桌面上“任务:
task = Box2RackRoute1(chassis)
task.init()
task.execute()
其他底盘的任务定义如下:
task = ToBasketRoute(chassis) # 底盘来到篮子前
task = Rack2BoxRoute1(chassis), # 底盘后退以将装有试管的试管架放置箱体
task = Box2RackRoute2(chassis), # 底盘来到第二个位置
task = ToTrayRoute(chassis), # 底盘向前移动以将试管转移到试管盘
task = Rack2BoxRoute2(chassis), # 底盘后退以将试管架转移到箱子
task = Box2RackRoute1(chassis), # 底盘后退以将试管架转移到箱子